

STEROWNIK COMMON RAIL | MAGISTRALA CAN WYMIANA DANYCH
| Mamy dla Ciebie ponad 4000 dostępnych wtryskiwaczy | |
| Cena | Gotowe wtryskiwacze - od 190 zł Regeneracja wtryskiwaczy - 80 zł + części |
| Czas realizacji | 24 - 48 godzin |
| Gwarancja | 2 lata bez limitu kilometrów |

W naszej ofercie znajdziesz wtryskiwacze, pompowtryskiwacze oraz pompy Common Rail!
- nowe
- regenerowane na wymianę
- używane z gwarancją
Magistrala CAN to jeden z najważniejszych elementów w samochodowych systemach sterowania, umożliwiający przesyłanie danych między różnymi komponentami pojazdu. Wymiana informacji w systemie Common Rail odbywa się dzięki magistrali CAN, która odpowiada za przesyłanie informacji o parametrach pracy silnika. Magistrala CAN jest obecna w większości współczesnych samochodów, zapewniając szybką i niezawodną transmisję danych, a jej wymiana to jedna z podstawowych czynności podczas diagnozowania i naprawy awarii w samochodzie. Dlatego też ważne jest, aby korzystać z usług specjalistów z doświadczeniem, takich jak Bosch Service, który oferuje kompleksową diagnostykę i naprawę systemów Common Rail.
Wymiana danych magistralą (szyną) CAN – sterownik, a wtryskiwacze i pompa Common Rail
1. Bosch Diesel Service – pomiary, budowa, działanie, naprawa, test magistrali CAN
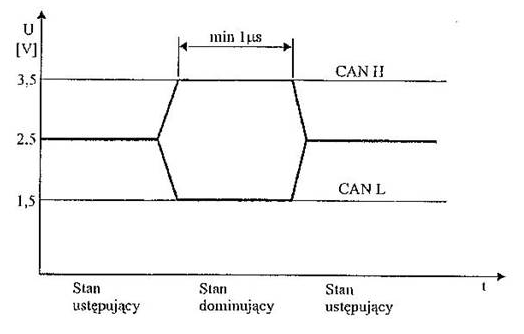
Intensywny rozwój układów elektrycznych w pojeździe przyczynił się znacząco do rozbudowy instalacji elektrycznej służącej do wzajemnego połączenia poszczególnych elementów. Początkowo stosowano przewody aluminiowe, które zostały wyparte przez przewody miedziane. Na przykład, w samochodzie Opel Kadet z 1975 roku długość przewodów miedzianych w instalacji elektrycznej tego pojazdu wynosiła łącznie ok. 300 m. W wyniku gwałtownego rozwoju dwadzieścia lat później w innym modelu koncernu, w Oplu Omedze, długość przewodów w instalacji elektrycznej wynosiła blisko 3 km. Dalsze perspektywy rozwoju wymagały wprowadzenia innych nowoczesnych układów połączeń, gdyż taka architektura instalacji elektrycznej była zbyt skomplikowana i jednocześnie nie była w stanie sprostać nowym rozwiązaniom z zakresu bezpieczeństwa czy też obsługi różnorodnych układów telekomunikacyjno-multimedialnych. Zatem konieczne stało się stworzenie w pojazdach multipleksowej komunikacji sieciowej, która zapewni możliwość dalszego rozwoju pokładowych systemów bezpieczeństwa, układów poprawiających komfort podróżowania, a także układów wspomagających pracę układu napędowego przy jednoczesnej redukcji zużycia miedzi w pojeździe. Obecnie w różnego typu pojazdach samochodowych z układem wtryskowym Common Rail, pompami PLD, pompowtryskiwaczami są wykorzystywane rozbudowane sieci przesyłu danych, których to przesył odbywa się za pomocą metody szeregowej. Sieć zbudowana jest ze sterowników odznaczających się tym samym priorytetem, dzięki czemu może być stale powiększana o nowe sterowniki. Zazwyczaj transmisja danych opiera się na następujących normach: SEA J1979, SEA J1850, ISO 9141, ISO 15765, ISO 14230. We współczesnej Europie ukształtowała się tendencja polegająca na wykorzystywaniu standardu magistrali CAN (z ang. Controller Area Network), odznaczająca się dużą prędkością przesyłu danych. W zależności od standardu ISO dla CAN wyróżnić można ISO 11898, w której szybkość transmisji danych wynosi do 1 Mbit/s i ISO 11519 gdzie prędkość transmisji danych wynosi do 125 kbit/s. Dodatkowym atutem tego systemu jest tzw. wielodostępność umożliwiająca sterownikom odbiór wszystkich informacji. To sterownik, bazując na polu nagłówków wyposażonym w identyfikator informacji, decyduje czy dana wiadomość jest mu potrzebna i należy ją zapisać w pamięci, czy też należy ją zignorować i zaczekać aż ukażą się nagłówki kolejnego pakietu. Sama magistra-la zbudowana jest z dwóch przewodów wzajemnie ze sobą skręconych, tworząc tzw. skrętka o długości maksymalnej do 40 m. Poprzez te przewody mogą przepływać trzy rodzaje poziomów napięcia stanowiących odpowiedni rodzaj sygnału w magistrali. Od głównej linii magistrali natomiast mogą odchodzić odgałęzienia, na których końcu znajdują się czujniki, a długość odgałęzienia nie powinna przekraczać 30 cm. Przykład poziomów napięcia w przewodach przedstawiono na rysunku 3.6.
Rys. 3.6. Wykres przedstawiających trzy możliwe przebiegi napięcia sygnału w sieci CAN z dodatkowym przedstawieniem dwóch głównych przewodów magistrali o nazwie CAN_H (Hight) i CAN_L (Low) Common Rail.
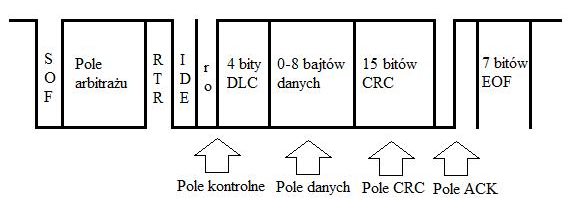
W magistrali CAN wymiana danych przebiegać może w sposób rozgłaszania informacji lub ich adresowania. Rozgłaszanie przebiega na drodze przesyłania informacji do wszystkich poszczególnych węzłów powiązanych z główną linią magistrali. Informacje zawarte w tzw. ramce danych nie mają konkretnego adresu docelowego, co powoduje szybsze przekazywanie informacji i brak konieczności ich rozszyfrowywania w węźle odbiorczym. Zatem to poszczególne węzły decydują czy informacje przesyłane w konkretnych ramkach danych są istotne dla danego węzła, czy też nie i kwalifikują się do ich odrzucenia lub do ich zapisu w pamięci węzła. Adresowanie występuje tylko przy przesyłaniu informacji o wysokim poziomie istotności, które kierowane są do danego węzła odbiorczego, a informacje w niej zawarte dotyczyć mogą m.in. cyklicznego pomiaru ciśnienia, czy też np. prędkości obrotowej wału korbowego silnika Common Rail. Gdy węzeł stwierdzi, iż informacja, którą otrzymał, jest mu przydatna, wysyła potwierdzenie. W przypadku braku potwierdzenia stacja nadawcza powtarza proces wysyłania informacji w postaci ramki danych. W dalszej kolejności, gdy występuje po raz kolejny, brak akceptacji wysłanych informacji następuje ignorancja ramki i oczekiwanie na następną serię danych. Na rysunku 3.7. przedstawiono, w sposób graficzny typową ramkę danych wykorzystywaną w magistrali CAN w celu przesyłania informacji. Ramka danych składa się z pól bitowych, w których wyróżnić można:
- początek ramki (pole startowe) SOF (ang. Start of Frame) bit o poziomie logicznym „0” wskazujący początek ramki danych,
- pole arbitrażu składające się z 11 bitów wiadomości oraz bitu RTR (ang. Remote Transmission Request); bit RTR może posiadać dwa stany logiczne „0” lub „1”, które kolejno informują, iż pole zawiera dane bądź wysyłają informację o udostępnienie danych z innych węzłów magistrali,
- pole kontrolne, w którym zawartych jest 6 bitów; dwa pierwsze (czyli IDE i RO) służą do ewentualnego użycia w przyszłości, natomiast 4 ostanie bity DLC (ang. Data Lenght Code) informują o liczbie bajtów danych zawartych w tym polu,
- pole danych zawiera odpowiednio od 0 do 8 bitów zapisanych w tej ramce informacji,
- pole CRC zawiera 15 bitów służących do weryfikacji poprawności transmisji danych,
- pole ACK (ang. Acknoweledge field) składające się z 2 bitów, z których w zależności od kolejności nadawania jeden pozostaje bitem dominującym, a drugi bitem wypełniającym; bit dominujący weryfikuje poprawność odebrania informacji przez poszczególne węzły,
- pole EOF (ang. End of Frame) zawiera 7 bitów stanowiących jednocześnie koniec ramki danych.
Rys. 3.7. Przykład ramki danych magistrali CAN (Common Rail)
Warto również zauważyć, że wyróżnia się dwie wersje magistrali CAN o różnej wielkości ramki danych:
- standardowa SCAN (wersja 2.0A) z 11 bitową identyfikacją nagłówków ramki danych,
- rozszerzona ECAN (wersja 2.0B) z 29 bitową identyfikacją nagłówków ramki danych.
Podsumowując, dzięki wprowadzeniu transmisji danych przy użyciu szeregowej magistrali CAN uzyskano możliwość szybkiej i łatwej wymiany danych pomiędzy poszczególnymi elektronicznymi modułami układu sterowania silnika, zapewniając tym samym swobodną wymianę i odbiór niezbędnych informacji. Ponadto dzięki zastosowaniu takiej metody transmisji znacząco zredukowano długość licznych przewodów elektrycznych do jednego głównego, którym przebiegają wszystkie najważniejsze informacje niezbędne do prawidłowej pracy silnika Common Rail oraz sterowania innymi podrzędnymi funkcjami.


Komentarze
Nikodem
Wystawiono Rok temu
Sterownik Common Rail to elektroniczne urządzenie, które odpowiada za kontrolowanie działania układu wtryskowego Common Rail. Sterownik jest zwykle zintegrowany z komputerem pokładowym samochodu i komunikuje się z silnikiem za pomocą czujników oraz magistrali diagnostycznej. Sterownik Common Rail kontroluje i reguluje parametry takie jak ciśnienie paliwa na szynie Common Rail, czas trwania wtrysku paliwa przez końcówki wtrysków, oraz ilość recyrkulowanych spalin za pomocą EGR. Magistrala CAN (Controller Area Network) to system komunikacji między różnymi elementami elektroniki samochodu. Magistrala ta pozwala na wymianę danych między różnymi modułami elektronicznymi, takimi jak komputer pokładowy, sterownik silnika, układ ABS, klimatyzacja itp. Sterownik Common Rail wykorzystuje magistralę CAN do komunikacji z innymi modułami elektronicznymi w samochodzie. Sterownik Common Rail przesyła dane z czujników takich jak czujnik położenia przepustnicy, czujnik temperatury powietrza dolotowego, czujnik ciśnienia na szynie Common Rail oraz inne, do komputera pokładowego, a następnie komputer pokładowy przesyła sygnały zwrotne do sterownika Common Rail, aby dostosować dawkowanie paliwa i recyrkulację spalin. Wymiana danych między modułami elektronicznymi w samochodzie za pośrednictwem magistrali CAN pozwala na bieżące monitorowanie i kontrolowanie parametrów pracy silnika oraz innych układów w samochodzie, co przyczynia się do lepszej wydajności i bezpieczeństwa jazdy.
Czy ta opinia była pomocna?
Konrad
Wystawiono 4 lata temu
Czy u was przeprowadzacie kalibrację wtryskiwaczy common rail? Byłbym zainteresowany.
Czy ta opinia była pomocna?
Bydgoszcz Radosław
Wystawiono 5 lat temu
Co to jest magistrala CAN? Bo robiłem wtryski, mechanik je zamontował w pół godziny i auto tak średnio jeździ. Myślałem, że to może ten komputer czy coś, ale nic się nie zgadza... Niezakodowane wtryskiwacze objawy mogą dawać właśnie takie?
Czy ta opinia była pomocna?
Karol
Wystawiono 5 lat temu
Diagnostyka magistrali can to chyba nie jest trudna sprawa.
Czy ta opinia była pomocna?
Rysia
Wystawiono 5 lat temu
Tyle się słyszy o tej magistrali i dopiero teraz wiem co to jest :)
Czy ta opinia była pomocna?